
Komento-ohjaus (Command Control)
TÄMÄ ON TOISTAISEKSI "AIVORIIHI-TEKSTIÄ", SIIVOTAAN MYÖHEMMIN ARTIKKELIN MUOTOISEKSI!
Mitä on komento-ohjaus
Komento-ohjauksella tarkoitetaan sellaista pienoisrautatieveturin ohjaamista, jossa veturin ohjauskomennot erotellaan muiden vetureiden komennoista veturin sisällä. Komento-ohjauksessa kiskoja pitkin syötetään kaikkien vetureiden tarvitsema ajovirta ja ohjauskomennot ja veturissa sijaitseva ilmaisin tai dekooderi selvittää mikä tieto on tämän veturin tietoa.
Vastustan digitaali-nimen käyttöä komento-ohjausjärjestelmien yleisnimikkeenä. Ensiksikin, digitaalitekniikkaa on käytetty pienoisrautateillä ennen komento-ohjausjärjestelmiä, mm. Tapiolan pienoisrautatien edesmenneen radan ohjauksessa, ja digitaalisia tietokoneita on käytetty liikennöinnin apuvälineenä vaihtotyölistojen, kalustokierron yms. suunnitelussa. Ensimmäiset komento-ohjausjärjestelmät olivat täysin analogisia, ja perustuivat erilaisiin virityspiireihin ym.
Jos komento-ohjauksesta voi käyttää nimitystä digitaali, voisi yhtä hyvin kutsua kaikkia kelloja digitaaleiksi, koska jotkut niistäkin ovat digitaalisia! Sana "digitaalinen" tuntuu vieraalta, ja sen voi kyllä suomentaa: se on "numeerinen", mutta sittenhän se ei enää olisi niin jännää….
Komennot voidaan välittää mitä moninaisimmilla tavoilla:
Eritaajuisina analogisina signaaleina kuten radiossa, joka antennin kautta saa eri lähettimien eritaajuisia viestejä ja joista vastaanottimen virityspiiri poimii halutulta taajuudelta radiokanavan). Yksinkertainen versio aiheesta oli Trixin EMS: kiskoihin syötettiin tavanomaisen tasavirran lisäksi korkeataajuista (n. 10 kHz:n) signaalia, jonka EMS-vastaanottimella varustettu veturi tunnisti, muut veturit eivät reagoinet näin korkeataajuiseen vaihtovirtaan. Useampia taajuuksia sekaisin lähettäviä järjestelmiä olivat mm. amerikkalaiset Dynatrol (erittäin suosittu!) ja salota sekä englantilainen Airfix. Englantilaisen komponenttikauppa Maplinin kytkentäkaaviokirjasissa esiteltiin aikoinaan omatekoinen nelikanavainen analoginen komento-ohjausjärjestelmä.
Signaali voidaan lähettää myös aikajakoisena:
Aikajakoisessa signaalissa lähetetään esimerkiksi kiskoja pitkin aina samassa järjestyksessä eri veturien tiedot peräkkäin ja veturissa oleva vastaanotin tai dekooderi tietää monesko saapuva komento on sille tarkoitettu ja toimii sen mukaisesti). Esimerkkinä tästä käy Model railroader -lehdessä aikoinaan julkaistu CTC-16-järjestelmä: Pulsseja lähetettiin aina 16 peräkkäin, yksi kullekin vastaanottimelle, ja pulssin leveys määritteli ko. veturin nopeuden ja kulkusuunnan. Järjestelmä on puolittain digitaalinen ja puolittain analoginen: Pulssien järjestys on numeerista tietoa, mutta pulssin leveyden tulkinta tapahtui analogisesti pienoismallien radio-ohjauslaitteden sevopiirillä.
Signaali voidaan myös lähettää osoitteellisina paketteina:
Dekooderi selvittää kaikkien saapuvien pakettien osoiteosasta, kuuluuko paketissa lähetetty komento -- nopeustieto tms -- sille, vai ei. Nykyisin käytössä olevat järjestelmät perustuvat jälkimmäiseen tapaan. Nämä järjestelmät ovat poikkeuksetta digitaalisia, eli numeerisia. Esimerkkeinä Hornby Zero-1, Märklinin, ja NMRA:n komento-ohjausjärjestelmät.
Miksi komento-ohjaus
"Milläs me ennen ajettiin, kun ei ollut digitaalia?" Komento-ohjaus on luotu lisäämään pienoisrautatien ajamisen esikuvanmukaisuutta.
Ei VR:llä ole kytkimiä, joilla joku joutuisi pitämään eri rataverkon osilla liikkuvat veturit ja niiden ajosäätimet (ohjaamon ajopöydät) toisiinsa kytkettyinä. Kuljettaja voi aina tietää että veturissa olevat ajosäätimet ohjaavat juuri sitä veturia, jossa ajosäätimetkin ovat, ilman että joku ulkopuolinen pitäisi yllä yhteyttä veturin ja sen ajosäätimien välillä.
VR:llä eivät veturissa olevan kuljettajan ajosäätimet (ajopöytä) saata äkisti irrota veturista, tai kytkeytyä ohjaamaan aivan toista veturia vain siksi, että veturi liikkui rataverkon osalta toiselle, tai siksi että toinen veturi tuli lähelle kuljettajan ohjaamaa veturia. Olisihan aivan luonnotonta että kuljettajan pitäisi yhtäkkiä vaihtaa toisen veturin ohjaamoon, hallitakseen veturia, jota hän äskettäin ohjasi vain siksi, että veturi siirtyi rataverkon osalta toiselle.
Komento-ohjauksella veturi ja veturin ajosäätimet ovat koko ajan kytkettyinä toisiinsa riippumatta veturin sijainnista rataverkolla, ja riippumatta toisista rataverkolla kulkevista vetureista.
Komento-ohjauksen mahdollisuudet eivät rajoitu pelkästään veturin nopeuden ja suunnan hallintaan, vaan usein on mahdollista saada käyttöön lisätoimintoja, yleeensä ainakin ajosuuunnan mukaan vaihtuvat valot, jotka voivat palaa kirkkaasti vaikka veturi seisoisi paikallaan. Lisäksi voidaan käyttää erikseen ohjattavia savutuslaitteita, koneistovaloja, tulipesän loimotusta imitoivia valoja, äänigeneraattoreita, moottorivaunujen aukeavia ovia ja jopa täysin toimivia rautatienostureita, lumiauroja yms. Veturin kiihtyvyys ja hidastuvuus, suurin ja pienin nopeus ja jopa eri nopeusportaiden väliset suhteet voidaan esiohjelmoida. Veturin moottorin vastasähkömotorisen voiman mittaavat dekooderit ovat tulleet markkinoille, jolloin moottoria voidaan ohjata erityisen tarkasti. Muuan harastelija on rakentanut dekoodereita, jotka on suunniteltu ohjaamaan tavanomaisen tasavirtamoottorin sijaan askelmoottoria, jolloin veturin moottori on täysin hallinnassa.
Nykyaikaiset dekooderit toimivat myös tavanomaisella radalla, joskaan eivät aivan yhtä hyvin kuin komento-ohjauksella, mutta kuitenkin. Erityisesti feedback-ominaisuuksin varustetut tavanomaiset ajolaitteet ovat vaikeuksissa koettaessaan tulkita dekoodrin kautta ohjattavan veturin liikkeitä: koska veturin vastasähkömotorinen voima hukkuu dekooderin vahvistimeen ja ajolaite "yliohjaa" veturia (veturi kulkee joko hiljaa tai kovaa, mutta ei siltä väliltä!)
Tavanomaisilla radoilla käytetyt erilaiset elektroniset radanpuhdistuslaitteet (mm. Relco) tuhoavat dekooderin alta aikayksikön. Elektroniset puhdistuslaitteet lähettävät kiskoihin suuritaajuisen, yli tuhannen voltin signaalin, joka polttaa (ionisoi) virtapiirissä olevan eristävän lian. Tätä eivät dekooderien suojaukset kestä. Ilman dekooderiakin saattavat raudattomalla kelloankkurilla varustetut Escap-, Faulhaber- jne -moottorit turmeltua elektronisten puhdistuslaitteiden käytöllä piankin, koska moottorien hennot ja kevytrakenteiset, jalometallein päällystetyt kommutaattorit arpeutuvat pian käyttökelvottomiksi. Monien mielestä näissä radanpuhdistuslaitteissa pitäis olla varoitus: "Tämä laite on hengenvaarallinen kaikelle elektroniikalle". Vaarassa ei ole pelkästään veturin elektroniikka, vaan mahdollisesti jopa ajolaitteet.
Jos elektronisia puhdistuslaitteita halutaan tavanomaisella radalla käyttää, on puhdistuslaitteet varustettava erillisellä käyttökytkimellä. Puhdistuskäyttöön on syytä valita vain yksi veturi, jonka moottori on helposti purettavissa ja uudelleen koottavissa, jotta sen kommutaattori ja hiilet voidaan tarvittaessa vaihtaa tai huoltaa. Puhdistuslaitteella rataa puhdistettaessa ajetaan vain tällä veturilla, ja puhdistusajon päätteeksi puhdistuslaite kytketään visusti pois päältä.
Muista että kestoimagneetilla varustettua tasavirtamoottoria purettaessa ei moottorin ankkuria tule vetää pois staattorikentästä, sillä moottorit on usein magnetoitu koottuina, ja ankkurin poistaminen magneettikentästä heikentää kenttämagneetin tehoa: tämän seurauksena moottorin kierrosnopeus yleensä nousee tehon kustannuksella.
Useimpien nykyisten komento-ohjauslaitteiden yhteydessä on (teoreettinen) mahdollisuus ajaa yhtä veturia ilman dekooderia dekooderein varuistettujen junien seassa.
Raudattomalla kelloankkurilla varustetut moottorit eivät kuitenkaan kestä ajoa digitaalisesti komento-ohjatulla radalla ilman vastaanotinta, sillä niillä ei ole kykyä vastustaa suuritaajuisen (digitaalisen) energian pääsyä moottoriin (impedanssi 4—10 kHz:n taajuudella liian alhainen). Jos tällainen veturi seisoo rataverkolla, se "inisee" tai vinkuu, koska veturin moottori saa suurtaajuista energiaa samalla tavalla, kuin jos veturin moottori pyörisi jatkuvasti, mutta koska moottori ei kuitenkaan pyöri, ei sen käämitys pääse ilmavirrassa jäähtymään, ja moottorin käämitys tuhoutuu!
Komento-ohjausta voidaan käyttää myös radan vaihteiden, opastimien yms. ohjaukseen. Näin voidaan radan kaapelointia yksinkertaistaa. Komento-ohjausjärjestelmällä ei tarvita useita johtoja kojetaulun ja radan välillä, kojetaulu voidaan jopa korvata tietokoneella, jonka näytöllä on esikuvan releasetinlaitteen paneelia muistuttava kuva radasta ja sen vaihteista ja opastimista ja vaihteita ohjataan näppäimistöllä tai hiirellä, tai käytetään tavanomaista kojetaulua, jonka painikkeet ja kytkimet kytketään ohjausväylään joka puolestaan kytketään komento-ohjaus-keskusyksikköön. Vaihteet ja opastimet kytketään veturivastaanottimien tapaisilla kiinteillä dekoodereilla kiskoihin, joista ne ottavat tehon ja ohjauksen.
Miksi ei komento-ohjausta
Komento-ohjauksen varjopuoliksi lasketaan usein dekoodereiden asennustyö, vastaanottimien suuri koko, kustannukset, pyöritettävän nupin sijaan taskulaskinta tai TV:n kaukosäädintä muistuttavat ajolaitteet ja eri valmistajien tuotteiden yhteensopimattomuus ja laitekirjavuus markkinoilla.
Dekooderin asentaminen edellyttää nykyaikaisessa kaupallisessa kalustossa yleensä valmiina olevan oikosulkupalan irroittamista ja dekooderin pistoliittimen työntämistä sen paikalle. Vanhemman kaluston kohdalla ongelmaksi saattaa muodostua se, että moottorin kumpikin napa on saatava erotetuksi veturin pyöristä. Esimerkiksi Fleischmann-vetureissa vain toisen puolen pyörät ovat eristetyt, ja veturin runko on sähköisesti yhdistynyt eristämättömiin pyöriin, ja koska moottorin toinen hiiliharjan pidin on eristämätön, kulkee eristämättömien pyörien kautta virta suoraan moottorille. Tässä tapauksessa on moottorin laakerikilpi -- jossa hiiliharjan pitimet ovat -- vaihdettava, jotta moottori saadaan kokonaan erotetuksi pyöristä. Englantilainen ZTC valmistaa nykyään myös (kalliita) kolmijohtimisia vastaanottimia, jolloin moottorin eristäminen rungosta ei ole enää tarpeen.
Vastaanottimen suuri koko haittaa etenkin suomalaismalleja rakentavia, koska kaikki tila halutaan lisäpainoille eikä hyttiin haluta piirilevyn palasta kuljettajafiguurin sijaan
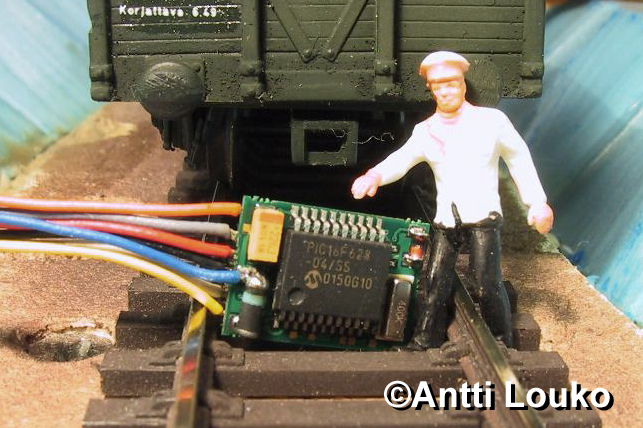
Yllä kuvassa Lenzin LE010-dekooderi H0-ukkelin seurassa code 100 radalla -- pienimmät omatekoisetkin vastaanottimet ovat kutakuinkin H0-figuurin kokoisia (11 x 6 x 3 mm).
Kustannuksia aiheuttaa keskusyksikkö, ja vastaaottimet. Keskusyksikön hinta on usein nelinumeroinen. Kustannuksia voi pudottaa omalla työllä: Muutaman tunhannen markan keskusyksikön voi korvata vanhalla PC:llä ja muutaman sadan markan komponenteilla. Mikäli halutaan valmiita, pienikokoisia ja monipuolislla toiminnoilla varustettuja vastaanottimia, voi sellaisita joutua pulittamaan toista tonnia. Kaupalliset vastaanottimet maksavat halvimmillaan (internetin kautta Ruotsista VISA-kortilla tilattuna) noin 110 markkaa, omatekoisen vastaaottimen osat Helsinkiläisistä elektroniikka-alan kaupoista ostettuna noin 80 markaa, Internetin kautta saksasta tilaten ehkä noin 70 markkaa. Jos koko ei ole esteenä, ei vastaanottimien itserakentamiseen ole välttämättä enää taloudellisia perusteita. Jos ollaan harkitsemassa suuremman radan sähköistystä tavanomaisella periaatteella tai komento-ohjauksella, saattaa komento-ohjaus tulla edullisemmaksi, koska paksua kaapelia tarvitaan vähemmän, eikä kojetauluun tarvitse asentaa läheskään sellaista määrää kytkimiä kuin tavanomaisessa järjestelmässä. Käytännössä kustannussäästöä tuskin syntyy, sillä usein rata on kuitenkin jo valmiiksi kaapeloitu vanhalle järjestelmälle ja jokaiseen veturiin tulee asentaa vastaanotin.
Pelkästään TV-kaukosäätimiä muistuttavia ohjauslaitteita käyttävät enää harvat valmistajat. Näissä säätimissä pyrittiin saamaan kaikki järjestelmän ominaisuudet hallittavaksi yhdellä ja samalla ohjaimella. Nykyisin valmistajat ovat kehittäneet valmistajakohtaisia ohjausväyliä, joihin voidaan kytkeä saman valmistajan tai valmistajaleirin erilaisia ajolaitteita lähes rajattomasti. Lähes kaikilla on tarjolla myös pyöritettävä nopeussäädin!
Pakko-sitoituminen yhteen merkkiin näkyy nykyisin yleensä enää ohjausväylissä: ne ovat valmistajakohtaisia, joten keskusyksikön valinta pakottaa tietyn valmistajan tai valmistajaryhmän ajolaitevalikoiman käyttäjäksi. Käytännössä väyliä on vain kaksi erilaista: Lenzin teollisuusautomaatiosta tuttuun RS-422/485-väylään perustuva X-bus ja Digitraxin Ethernetiin perustuva LocoNet. Näiden lisäksi on NCE-bus josta tietoa ei tunnu saavan millään, ja Zimon käyttämä teollisuuselektroniikkaväylä CAN-bus, jota haukutaan tähän käyttöön turhan järeäksi
Laitekirjavuus oli menneinä vuosina sellainen, ettei ollut mitään toivoa saada eri valmistajien dekoodereita toimimaan samalla radalla, vaan harrastaja oli aina "naimisissa" oman valmistajansa kanssa: toisen valmistajan vastaanotin ei ymmärtänyt toisen valmistajan keskusyksikön komentoja. Nykyisin vastaanottimet ovat varsin hyvin keskenään vaihtokelpoisia.
On todettava, että se järjestelmä, josta tässä yhteydessä lähinnä puhutaan -- NMRA-DCC – ei ole ainoa tällä hetkellä markkinoilla oleva. Keski-Euroopassa (tai tarkemmin Saksaa puhuvalla kielialueella) on tarjolla käytännössä neljä erilaista järjestelmää: Märklinin 3-kisko-digital (Märklin 80), Trixin Selectrix (ei EMS!), Fleischmannin FMZ ja tämän NMRA-DCC:n kanssa yhteensopivat Lenzin järjestelmät (Arnold Märkiln 2-kisko- ja Lenz-järjestelmät) Lisäksi liikkeellä on vielä jonkin verran Hornbyn Zero-1-laitteistoja. Näistä mikään ei sinällään ole vaihtokelpoinen keskenään, mutta useimpien järjestelmien uusimmat vastaanottimet saattavat ymmärtää NMRA-DCC-komentoja. Tässä esityksessä ei puututa näihin muihin järjestelmiin kuin vittauksenomaisesti, koska ne ovat suurelta osaltaan yhden valmistajan laitteita.
Mitä muita vaihtoehtoja on tarjolla
Jos pyrkimyksenä on vain päästä katkokytkimistä ja rotareista eroon, voidaan näiden käyttö automatisoida. Tapiolan SRK:n pienoisrautatiekerhon vanhalla radalla junailmaisimien ja opastimien yhteiskäyttö mahdollisti täysin automaattisen ajovirran kytkentäjärjestelmän kehittämisen. Tässä järjestelmässä veturien sijainnista, valituista kulkuteistä ja opastimien tilasta pystyttiin tietokoneella päättelemään kullakin rata-alueella kulkeva veturi, ja kytkeä ko. veturia ajanut ajolaite tähän rata-alueeseen. Tällaista tietokoneen avulla automatisoitua järjestelmää kutsutaan Yhdysvalloissa termillä Compurezied Cab Control (CCC). Tapa jolla tietokone ja rata liitettiin yhteen muistutti suuresti Yhdysvaltalaisen Bruce Chubbin kehittämää Computer/Model Railroad Intefacea (C/MRI). Tapiolassa käytetty, edellistä yksinkertaisempi tietokoneen ja rautatien liityntäelektroniikka oli Petri Koskelan suunnittelema. Yleensä tällaiset järjestelmät edellyttävät vakiokokoonpanoista rataa, koska elektroniikka ainakin tuossa mainitussa järjestelmässä oli keskitetty, ja kaapelointia tarvittiin melko lailla lisää. Tietokoneistetusta rotarijärjestelmästä on myös kehitetty mielenkiintoinen kaupallinen tuote, jossa radan katkoalueet kytketään erilaisiin ohjausmoduuleihin, ja järjestelmän keskusyksikölle opetetaan radan muoto ja katkoalueiden väliset raideyhteydet, ja laitteisto hoitaa ajolaitteiden kytkennän taustalla. Edellytyksenä on opastinjärjestelmän laatiminen, koska junat eivät kuitenkaan saa mennä samalle erisetylle rataosuudelle. Valitettavasti laitteiston keskusyksikkö on ainoa, jossa on ajosäädin, joten useamman ajosäätimen hakinta edellyttää useamman (kiinteän) keskusyksikön hankintaa.
Komento-ohjausjärjestelmän määritelmän piiriin kuuluu myös radioteitse tai infrapunalla tapahtuva junien ohjaus. Kiskoissa kulkee vain tehoa, ja veturissa on pieni radio- tai ionfrapunavastaanotin ja vetureiden ohjauskomennot välittyvät ilmaa pitkin. Jokunen vuosi sitten PRK:n joulunäyttelyssä oli kuulemma joukko Kanadalaisia harrastajia kertonut heillä olevan radan jossa vetureissa on pienet akut, ja komennot lähetetään ratapöydän alla ratalinjaa myötäilevästä antennista, jonka signaalit veturivastaanottimet tulkitsevat. Radassa on jatkuvasti täysi käyttöjännite päällä, ja sillä ladataan vetureiden akkuja. Vetureiden akustojen turvin voidaan hankalasti viiroitettavia osia radasta, mm. vaihderyhmät, jättää täysin sähköistämättä. Sydämentahdistajan kanssa ei ratapöydän päälle kuulemma ollut syytä kumartua. Teknisesti tällainen järjestelmä on ylivertainen kaikkiin nykyisin tarjolla oleviin ratkaisuihin nähden, myös NMRA-DCC:hen nähden. Japanissa tämän tyyppisen järjestelmän uskotaan kuulemma lyövän itsensä läpi hyvinkin pian, ja syräyttävän nykyiset NMRA-DCC-laitteistot piankin – toisaalta, jos muuan USA:lainen valmistaja tekee kymmeniä tuhansia dekoodereita kuukaudessa, on nykyisen järjestelmän asennuskanta jo nyt niin valtava, ettei sitä syrjäytetä markkinoilta kovinkaan helposti (markkinavoimat eivät aina ole teknisesti edistyksellismmän järjestelmän kanssa samalla puolella viivaa).
Millainen on digitaalinen komento-ohjaus
Kuten alussa mainittiin, on kiskojen kautta välitettävä samanaikaisesti junien liikkumiseen tarvittava energia ja ohjauskomennot. Vanhemmissa järjestelmissä tämä toteutettiin usein niin, että kiskoissa oli jatkuvasti tasajännite (ikään kuin ajolaite täysillä) ja tieto ratsasti tämän tasajännitteen päällä, pieninä matalina muutaman voltin piikkeinä, joita vastaanotin tulkitsi. Ongelmia tuottivat häiriöt, joita kiskon ja pyörän välisessä yhteydessä aina on: muutaman voltin pulssi hukkuu helposti häiriöiden sekaan. NMRA DCC järjestelmässä tieto ja teho on yhdistetty niin, että tietoa välitetään ikään kuin suunnanvaihtokytkintä kääntelemällä. Kiskoissa on täysi teho päällä, ja "suuntaa vaihtamalla" saadaan aikaiseksi erilaisia pulsseja, ja niitä ryhmittelemällä voidaan laatia monimutkaisempia komentosarjoja.
Nolla ja ykkönen
On sovittu, että jos suunanvaihtokytkintä käännetään kaksi kertaa nopeasti (noin 50 mikrosekunnin välein!), vastaa tämä ykköstä ja jos suunanvaihtokykintä käännetään kaksi kertaa hitaasti (suunnanvaihtojen väli yli 100 mutta alle 1000 mikrosekuntia), vastaa tämä nollaa. Näin voidaan esittää kaksitilaista asiaa – esimerkiksi että juna liikku tai ei liiku. Tällöin ei vielä voi kertoa että junan tulee liikkua eteenpäin tai taaksepäin eikä sitä, kuinka lujaa sen tulee liikkua, eikä millään erotella, minkä radalla olevan veturin tulisi liikkua.
Bitti, tavu
Tietotekniikassa kaksitilaista numeroa, (eli meillä nyt nopeaa ja hidasta suunanvaihtokytkimen heilahdussarjaa), kuvataan englanninkielisellä termillä binary digit, eli bitti. Tietotekniikassa on lisäksi jostain syystä miellytty käsittelemään näitä bittejä kahdeksan ryppäissä. Tämmöistä kahdeksan ryvästä sanotaan tavuksi (byte). Tässä junien ohjausjärjestelmässä tietoa lähetetään tavuina, eli kahdeksan suunnanvaihtokytkimen heilahdussarjana. Tavut siis koostuvat hitaista suunanvaihtokytkimen heilahdussarjoista jotka tarkoittavat kaksitilaisen numeron, eli bitin arvoa nolla, ja nopeista suunnanvaihtokytkimen heilahdussarjoista jotka tarkoittavat kaksitilaisen numeron, eli bitin arvoa yksi. Kahdeksalla nollalla ja ykkösellä voi saada aikaan yhteensä 256 erilaista yhdistelmää (00000000; 00000001; 00000010; 00000011; 00000100 jne. aina 11111111 asti)
Tavun erottimet ja esipuhe
On sovittu, että vastaanottimille lähetetään ensiksi sellainen tavu, jossa lähetetään vastaanottimen osoite (eli vastaanottimen numero) ja seuraavassa tavussa vastaanottimelle lähetettävä toimintaohje. On sovittu että jokaisen tavun (eli kahdeksan suunanvaihtokytkimen heilahdussarjan) väissä tulee aina lähettää yksi nolla (hidas heilahdussarja). Ennen ensimmäistä tavua tulee lähettää vähintään kymmenen ykköstä (nopean heilahduksen sarjaa) ja tämä tulee erottaa varsinaisesta tavusta yhdellä nollalla (eli hitaalla heilahdussarjalla). Kutsutaan tätä kymmenen ykkösen sarjaa vaikka esipuheeksi (Preamble). Näin vastaanotin pystyy aina löytämään ja erottamaan ensimmäisen ja toisen tavun (ositteen ja tiedon).
Leikitäänpä vastaanotinta
Asetutaanpa vastaanottimen paikalle, ja ryhdytään tarkastelemaan kiskoissa tapahtuvaa liikennettä. Odotamme ensin, että saamme peräkkäin vähintään kymmenen ykköstä. Tästä tiedämme että on kyse esipuheesta (peamble), koska tavut ovat kahdeksan bitin mittaisia ja niiden välissä on aina nolla, ei yli kahdeksan ykkösen sarjaa voi olla muualla kuin esipuheessa. Esipuheen jälkeen jäämme odottamaan ensimmäisen tavun ja esipuheen välistä nollaa (ykkösiä voi olla enemmänkin kuin vain yksitoista). Jos saadaan nolla, tiedetään että seuraavaksi on tulossa paketin ensimmäisen tavun, eli osoitetavun (Address data byte) bittejä. Lasketaan kahdeksan bittiä eli suunanvaihtokytkimen heilahdussarjaa ja odotetaan nollaa, joka erottaa osoitetavun ohjetavusta. Jos kahdeksan osoitebitin jälkeen saadaan nolla, voidaan odottaa ohjetavun (instruction data byte) bittejä. Taas lasketaan kahdeksan bitin tavu, ja odotetaan nollaa. Se saadaan, ja voidaan olla varmoja että ollaan saatu yksi osoite- ja yksi tietotavu.
Tarkistussumma
Mutta entäpä jos kiskoilla sattuikin olemaan likaa juuri kuin luimme osoite- tai tietotavua, ja sekaan tuli tästä huonosta kiskokontaktista ylimääräinen pulssi, ja tulkitsemmekin osoitteen nyt väärin. On lähetetäävä vielä tarkistussummatavu (Error detection data byte), jonka avulla voidaan varmistaa osoite- ja tietotavun oikeellisuus. Tarkistussumma on yksi tavu, jonka bitit lasketaan osoitteen ja ohjeen vastaavien bittien avulla niin, että jos kumpikin on samoja (kumpikin on ykkönen tai nolla), on tarkistussummassa vastaavalla kohdalla nolla, ja jos vastaavat bitit olivat erilaisia, on tarkisussummassa tällä kohtaa ykkönen – eli hienosti sanottuna tarkistussumman bitin arvo on osoitetavun ja tietotavun väinen "poissulkeva TAI" (exclusive OR, XOR), vain ns. "JOKO-TAI" -tilanne tuottaa ykkösen, mutta se että molemmat olisivat ykkösiä, eli ns. "JA"-tilanne, tuottaakin nollan. Tällä tavoin saatetaan virheellisesti vastaanotettu osoitteen ja ohjeen yhdistelmä tunnistaa, ja jättää se tulkitsematta. Tarkistussumma-tavun jälkeen pitää seurata ykkönen, joka erotuksena tavujen väisestä nollasta kertoo vastaanottimelle, että tähän sarjaan ei kuulu enempää tavuja. Tällaista osoitetavun, ohjetavun ja tarkistussummatavun sarjaa kutsutaan paketiksi (packet). Kiskoja pitkin lähetetään jatkuvasti tietoa kaikille radalla ohjattaville vastanottimille, joten yhden paketin hylkääminen silloin tällöin ei vielä ole katastrofi, vastaanotin jatkaa edelliskerralla saamansa oikeaksi todetun paketin ohjeen mukaan, kunnes se saa uuden, virheettömän sille osoitetun paketin. Paketin viimeisen tavun – tarkistussumman jälkeisen ykkösen –avulla tunnistettiin siis paketin viimeinen tavu. On mahdollista että paketissa on useampia ohjetavuja, ja vasta tuo viimeisin ykkönen varmistaa vastaanottimelle, että paketin kaikki tavut on saatu (ja samalla kertoo, että se viimeisin tavu on tarkistussummatavu). Paketin perään siis lähetetään välittömästi seuraavan paketin esipuhe, osite- ja ohjaustavut. Keskusyksikkö lähettää kunkin aktiivisen vastaanottimen osoitteella varustettuja tavuja jatkuvasti, ja sen vastaanottimen paketteja, jonka tilaa juuri nyt muutetaan, lähetetään muita tiheämmin.
Ajosuunnan määräytyminen
Tässä on koko ajan puhuttu suunnanvaihtokytkimen heilahdussarjoista. On hyvä huomata, että vastaanotin ei ota kantaa kulloinkin kiskoissa vallitsevasta ajosuunnasta, vaan ainoastaan suunnan muutoksista, vastaanotin laskee aikaa, joka kuluu suunanvaihtohetkien välillä. Siksi esimerkiksi höyryveturi, jota on komennolla käsketty menemään eteenpäin, siis savupiippunsa suuntaan, kulkee edelleen savupiippunsa suuntaan, vaikka se käännettäisiin kiskoilla toisinpäin. Tietopaketissa annetaan veturille suunta eteen tai taaksepäin, ja se tarkoittaa suuntaa veturin kannalta, ei radan ajosuunnan kannalta (etelään, tai pohjoiseen tai myötä- tai vastapäivään).
Palataan myöhemmin näihin paketin sisältämiin tietoihin, sanomattakin on selvää, että paketti saattaa sisältää muutakin tietoa, kuin vain veturin numeron, nopeuden ja suunnan.
Järjestelmän osat
Tässä keskitytään yleisimpien kaupallisten komento-ohjausjärjestelmien järjestelmien osajakoon. Tapiolan TMW-DCC poikkeaa tästä huomattavasti, palataan Tapiolan järjestelmään myöhemmin.
Järjestelmän äly asuu keskusyksikössä (control unit). Se luo näitä bittejä ja tavuja. Keskusyksikkössä ei yleensä ole veturien ohjaamiseen tarvittavia ajosäätimiä vaan ajolaitteet (cab), kytketään keskusyksikköön erillisen ajolaiteväylän (cab bus) avulla. Keskusyksikkö ei usein jaksa ohjata rataa, vaan tarvitaan vahvistimia (booster, power station). Vahvistimet kytketään keskusyksikköön ohjausväylän (control bus) avulla. Mikäli järjestelmään halutaan tietoa radasta tai tavanomaiseta kojetaulusta keskusyksikköön päin, käytetään erityisiä takaisinkytkentäyksiköitä, ja ne kytketään keskusyksikköön takaisinkytkentäväylän (feedback bus) kautta.
Keskusyksikkö siis "lukee" ajolaitteiden säätimiä ajolaiteväylän kautta, ja luo edelläkuvattuja paketteja, ja lähettää niitä ohjausväylää pitkin vahvistimille, jotka syöttää rataa ja edelleen kiskojen kautta vetureiden dekoodereita. Mikäli radassa on junailmaisimia, tai erillisiä kojetauluja vaihteiden käyttöön tms. kytketään nämä laitteet takaisnkytkentäyksiköihin ja ne takaisinkytkentäväylän kautta keskusyksikköön. NMRA ole standardoinut ajolaite- ohjaus- eikä takaisinkytkentäväylää. Siksi on olemassa erilaisia väyläratkaisuja, jotka eivät ole keskenään vaihtokelpoisia!
Keskusyksikkö
Keskusyksiköt ovat poikkeuksetta pieniä tietokoneita, joita hallitaan monipuolisten ajosäätimien kautta. Keskusyksikkö on yleensä järjestelmän kallein osa, ja sen valinta sitoo etenkin ajolaiteväylän, mutta usein myös ohjaus- ja takaisinkytkentäväylän vuoksi tietyn valmistajajoukon vahvistimien, ajolaitteiden ja takaisinkytkentäyksiköiden käyttäjäksi (mutta ei sido vastaanottimien osalta!) Keskusyksikön käyttöjärjestelmä, eli keskusyksikön prosessorin toimintaohjeet on usein talletettu siten, että se voidaan vaihtaa myöhemmin, mikäli valmistaja tai standardi tuo uusia ominaisuuksia järjestelmään.
Ajosäätimet tai ajolaitteet
Ajosäätimiä on hyvin erilaisia: Yleensä tarvitaan yksi erityisen monipuolinen säädin tai ohjain, jonka avulla hallitaan kekskusyksikön toimintaa, ja se yleensä muistuttaa enemmän tv:n kaukosäädintä, kuin tavaomaista pienoisrautatien ajolaitetta. Tämän lisäksi voidaan järjestelmän ajolaiteväylään kytkeä vähemmän älykkäitä ohjaimia, usein kymmenittäin. Näissäkin on yleensä oma prosessori sisällä, joka luo ajosäätimien nuppeja ja nappeja tulkiten ajosäädinväylään lähetettäviä koodeja, jota keskusyksikkö tulkitsee.
Vahvistimet, suunnanvaihtomoduulit
Kaikki veturit saavat siis ohjauksen ja tehon vahvistimen ulostulosta. Jos vetureita on useampia saattaa virrankulutus kasvaa hyvinkin suureksi. Yleensä vahvistimet on mitoitettu noin neljän ampeerin virralle. Jos vahvistin antaisi huomattavasti tätä suurempia virtoja, saattaisi junan suistuminen aiheuttaa suuria oikosulkuvirtoja, jopa sulattaa metalliosia ja aikaansaada tulipalon vaaran. Jos radassa tarvitaan suurempia virtoja on rata syytä osittaa, ja varustaa erillisin vahvistimin, joita sama keskusyksikkö ohjausväylän kautta ohjaa. Näin myös esimerkiksi junan suistumisesta aiheutuva oikosulku ei pimennä koko rataa, vaan ainoastaan ko. vahvistimen syöttöalueen.
Vahvistimilla saatta olla myös kyky vaihtaa "napaisuutta": Jos radassa on paluusilmukka, voidaan yksi vahvistimista panna syöttämään tätä osaa. Kun juna ylittää vahvistimien syöttöalueen rajan, menee rata oikosulkuun. Jos toinen vahvistimista on varustettu paluusilmukkaominaisuudella, se kääntää ensin radan napaisuuden toiseksi, ja jollei se poista oikosulkua, kytkee rataosan virrattomaksi. On myös saatavilla erilaisia suunanvaihtomoduuleja (mm. Lenz), joiden avulla voidaan saman vahvistimen alueella tehdä osa radasta suuntaa vaihtavaksi (esimerkiksi veturitallin kääntölava tai kolmioraiteen yksi haara). Suunnanvaihto tapahtuu vahvistimen tapauksessa yleensä vaihtamalla signaalin vaiheistusta elektronisesti (nopea!), suunnanvaihtomoduuleissa se tehdään ilmeisesti useimmin releellä.
Käytännön osajako
Käytännössä jako keskusykstiköihin, ajosäätimiin ja vahvistimiin ei ole aina yhtä selväpiirteinen. Digitrax-järjestelmät (markkinajohtaja Yhdysvalloissa) ovat mielenkiintoisia: Halvimpien perusjärjestelmien yhdistetyt keskusykkö/vahvistimet voivat toimia kalliimpien järjestelmien suunnanvaihtomoduuleina tai apuvahvistimina. Sama väylä toimii ajolaite-, ohjaus- ja takaisinkytkentäväylänä. Saksalaisella Lenz’llä jako on selväpiirteisempi: Keskusyksikössä on väyläliitin ajosäätimille ja erilliset liittimet kojetauluun ja rataan asennettaville takaisinkytkentäyksiköille ja vahvistimimille.
Veturivastaanottimet
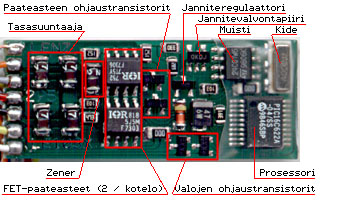
Nykyisten komento-ohjausjärjestelmien kehittyminen ei olisi mahdollista ilman mikroprosessoreiden ja mikro-ohjainten (controller) huimaa kehitystä. Nykyaikaisten komento-ohjausjärjestelmien vastaanottimien prosessorit voidaan toteuttaa myös tavanomaisin mikropiirein, mutta tilaa tarvittaisiin pienoisrautatien H0-tavaravaunun verran (ehkä kymmenkunta mikropiiriä). Veturivastaanotin sisältää yleensä tasasuuntaajan oheislaitteineen, mikroprosessorin oheislaitteineen ja tehopääteasteen. Tasasuuntajan tulee olla nopea, tavanomaisista tasasuuntaajasta ei ole nopeasti vaihtuvan "suunnanvaihtokytkimen heilahdussarjan" tassuuntaajaksi. Prosessori on usein ns. pesukoneprosessori, joka on vastaanottimen valmistuksen yhteydessä erityisellä ohjelmoitilaitteella "koulutettu" veturivastaanottimen prosessoriksi. Yleisin lienee Microchipin valmistama PIC-16F84, jota käytetään mm. satelliittivastaanottimien piraattikorttien prosessorina. Siksi sen koti-PC:hen liitettäviä ohjelmointilaitteita lienee niin viljalti saatavilla muun muassa Internetin kautta. Prosessori tulkitsee kiskoissa vaihtuvan virran napaisuuden vaihtumista ja osaa selvittää rataa pitkin tulevasta tiedosta nopeus- yms. -tietoja ja luoda siitä pääteasteen tarvitsemaa moottorin ohjaukseen tarvittavaa signaalia. Prosessorin yhteydessä on usein myös erityinen haihtumaton muisti (EEPROM), jonne on talletettu veturivastaanottimen osoite (numero) jne… Näitä tietoja voi komento-ohjausjärjestelmän käyttäjä itse muuttaa erityisellä ohjelmointiraideosalla tai nykyisin myös linjalla muiden vetureiden seassa. Pääteaste on yleensä suunniteltu moottorin pulssinleveysmoduulaatiokäyttöä varten. Tämä vaatii selitystä.
Jos moottorin pyörimisnopeutta halutaan säätää tapahtuu se tavanomaisilla ajolaitteilla ajettaessa usein moottorin saamaa jännitettä säätämällä. Kiskoissa vallitsevan komento-ohjausjännitteen (12—18 V) ja moottorille esimerkiksi hitaasti pyörittäessä tarjottavan 4 voltin välinen jännite-ero on tuhlattava lämmöksi. Jos moottori vie puolisen ampeeria virtaa, kuluisi vastaanottimessa noin viiden watin teho lämmöksi. Jaksottamalla moottorille tuleva virta niin, että moottori saa tietyllä vakoitaajuudella eri mittaisia täyden jännitteen virtasykäyksiä, on moottorin saama energiamäärä säädettävissä. Koska vastaanotin vain kytkee ja katkaisee moottoin virtaa, ei tästä juurikaan synny lämpöä. Tämä ohjaustapa kuitenkin usein aiheuttaa moottorin murinaa. Pulssien välinen taajuus on usein muutettavissa, jolloin voidaan valita sellainen taajuus, joka aiheuttaa vähiten moottorin murinaa.Kelloankkurimoottorit (Faulhaber, Escap, jne.) aina pidä tästä, usein melko matalataajuisesta pulssimuotoisesta ohjauksesta. Näitä moottoreita varten on kehitetty tavanomaista suuremmalla taajuudella toimivia pulssinleveysmodulaattoreita, jolloin lämpeneminen jä murina vähenevät lähes olemattomiin (muuan valmistaja puhuu Stealth-dekoodereista, koska veturista tulee näin lähes äänetön).
Vastaanottimen ominaisuuksiin kuuluvat myös erilaiset nopeusporrasvalinnat. Perusvastaanottimet pystyvät vain 14 nopeusportaan tilaan, useimmat nykyisistä yleensä ainakin 28 portaan ja parhaimmat 128 portaan tilaan.
Vastaanottimen prosessori saattaa myös ohjata veturin valoja yms lisälaitteita ja sisältää jopa äänigeneraattorin, jolla voidaan tuottaa veturin ääniä ja eri toiminnoilla ohjata ilmapumpun ja viheltimen ääniä yms. (Soundtraxx). Mitä useampia ohjattavia laitteita ja ominaisuuksia halutaan, sitä kalliimpi on usein vastaanotinkin.
Muita vastaanottimen ominaisuuksia saattavat olla muun muassa moottorin vastasähkömotorisen jännitteen tunnistus, ja näin pulssisuhdetta ei ohjatakaan suoraan komento-ohjaussignaalien mukaan, vaan säädössä otetaan huomioon moottorin pyörimisnopeuden ja komento-ohjauskäskyjen yhteisvaikutus. Lisäksi eräillä valmistajilla on sellaisia junaan asennettavia lisälaitedekoodereita, jotka pystyvät ohjaamaan lisälaitteita mutta eivät moottoria. Näitä voidaan käyttää esimerkiksi ohjausvaunun valojen ohjaamiseen, jolloin junan läpi ei tarvitse vetää johtoja junan toisen pään ajovalojen ohjaamiseksi.
On hyvä muistaa, että läheskään kaikissa vastaanottimissa ei ole virranrajoitusta, jolloin veturissa tapahtuva oikosulku, moottorin ylikuormitustilanteessa tapahtuva suuri virta tai liian suuritehoisten valojen tai lisälaitteiden käyttö saattaa tuhota vastaanottimen. Yleensä vastaanottimista ilmoitetaan niiden suurin sallittu virta. Se on moottorin ja valojen yms. yhteenlaskettu virta, ja sitä rajoittaa vastaanottimen tasasuuntajan tehonkesto. Sen lisäksi ilmoitetaan erikseen kullekin lisälaiteelle ja mottorin ulostulolle sallittu suurin virta, ja tässä rajoittavana tekijänä on pääteasteiden tehonkesto.
Lisäksi saattaa joissain tapauksissa tulla tilanteita, joissa vastaanotin saa liian suuren jänniteen, ja vastaanotin vioittuu tai tuhoutuu (paluusilmukat ja vahvistimien syöttöalueiden rajat). Vaara on erityisesti käytettäessä sellaista kalustoa, jossa esimerkiksi höyryveturin pyörät virroittavat toiselta puolelta ja tenderi toiselta puolelta. On mahdollista että veturin toiselta puolelta virroitavat pyörät ovat toisen vahvistimen alueella, ja dekooderi saa järjestelmän maadoituksesta ja vaiheistuksesta riippuen mahdollisesti kaksinkertaisen syöttöjännitteen. Vastaanottimet on yleensä suojattu zener-diodilla, joka oikosulkee dekooderin tasasuuntaajan ja muun elektroniikan välistä. Oikosulku saattaa vaurioittaa tasasuuntaajan diodeja ja mahdollisesti zener-diodia. Tässä tuhoutuvat komponentit ovat markan kahden hintaisia, ja ne saattaa saada vaihdettua. Jos tämä suojaus kuitenkin pettää, ja moottoria ohjaavana pääteasteena on käytetty ns. FET-transistoreista koottua ns. H-siltaa, liian suuri jännite (yli 20 volttia) tuhoaa pääteasteen, ja pahimmassa tapauksessa tätä kautta jopa dekooderin prosessorin.
Kiinteät vastaanotimet tai dekooderit
Komento-ohjausjärjestelmää voidaan käyttää myös vaihteiden ja opastimien ohjaamiseen erityisten kiinteiden dekoodereiden avulla. Kiinteät dekooderit kytketään kiskoihin tai niihin kahteen johtimeen jotka tulevat vahvistimesta ja menevät kiskoihin. Lähes poikkeuksetta näissä on lähdöt neljälle vaihteelle. Ulostuloja voidaan toki käyttää muuhunkin kuin vain vaihteiden kääntöön. Ulostulot voidaan ohjata sysäyskäytölle (ulostulo on vain säädettävän hetken ajan päällä) tai ne saadaan jatkuvasti päälle.
Tässä yhteydessä kannattaa varottaa näiden kiinteiden vastaanottimien suojauksen puutteista: Pienoisrautyatiekerho ry:n radassa on useita kiinteitä vastaanottimia tuhoutunut, kun vaihdemoottori on jostain syystä mennyt oikosulkuun.
Ohjelmointi
Kaikki vastaanottimet ovat ohjelmoitavia. Tehtaalta tullessaan veturivastaanottimet reagoivat osoitteeseen numero 3, mutta jotta vastaanottimia voidaan ohjata erikseen, on niille kerrottava uusi osoite. Uusi osoite ohjelmoidaan vastaanottimeen usein erityisellä ohjelmointiraideosalla. Ohjelmointikäskyt ovat yleensä osoitteettomia, ja siksi on tärkeää, että ohjelmointikäskyt menevät vain yhdelle vastaanottimelle kerrallaan. Siksi radasta on ositettava erityinen osuus ohjelmointia varten. Ohjelmitaessa muu rataverkko kytketään yleensä virrattomaksi, ja vain ohjelmointiraideosalle ajettu veturi saa ohjelmointitilassa virtaa. Dekoodereiden ohjelmointitiloja on useita, ja yleensä kaikki dekooderit eivät ymmärrä kaikkia ohjelmointitiloja. Aina löytyy kuitenkin vähintään yksi sellainen ohjelmointitila, jota keskusyksikkö ymmärtää, vaikka sillä ei aina saataisikaan kaikkia dekooderin eri ominaisuuksia muutettua (ominaisuudet on talletettu konfiguraatiomuuttujiin, joita on määritelty 1024 erilaista!). Ohjemointiraideosalle syötetään ohjelmointitilassa virtaa vain rajoitetusti, joten dekooderin asentamisen jälkeen on viisainta tavanomaisen koeajon sijaan ensiksi kokeilla dekooderin ohjelmointia ohjelmointiraideosalla, vähäisempi virta todennäköisesti pelastaa dekooderin tuhoutumiselta mikäli väärinkytkentä on tapahtunut, eikä ohjelmointi suju.
Takaisinkytkentämoduulit
Yleensä järjestelmien takaisinkytkentämoduulit kytketään ohjausväylään, kuten PRK:n radan piilopihan kojetaulun vaihdekäyttökytkimet.
Komento-ohjauksen historiaa
Jotta voidaan kertoa jotain nykyisestä, on hyvä tietää jotain menneistä järjestelmistä.
Detroit-järjestelmä
Yksinkertaisimmillaan dekooderina voi olla diodi, jolloin vaihtovirran eri puoliaaltoja säätämällä saadaan ohjattua kahta junaa samanaikaisesti, toinen saa virtansa toisesta vaihtovirran puoliaallosta ja toinen toisesta Tätä kutsutaan Detroit-järjestelmäksi ja se on suosittu yhdysvaltalaisten raitiovaunuharrastajien keskuudessa. Eristäömällä raitiovaunujen pyöräkerrat, saadaan kolme johdinta käyttöön (ajokiskot ja ilmajohdin) jolloin neljää raitiovaunua voidaan ohjata samanaikaisesti.
Trix EMS ja Lionel
Järjestelmiä, joissa kaksi junaa voi liikkua samalla rataosalla, on ollut runsaasti. Yleensä toinen vetureista on ollut tavanomainen, ja toista on ohjattu suurtaajuisella virralla, johon tavanomaiset moottorit eivät reagoi. Trixin uudempi Selectrix on saman tyyppinen kuin NMRA-DCC, ja Selectrix keskusyksiköt osaavat ohjata sekä Trix Selectrix että NMRA-DCC-vastaanottimia, ja käsittääkseni jopa samanaikaisesti!
Hornby Zero-1
Englantilaisen Hornbyn Zero-1 oli ilmeisestikin ensimmäinen kaupallinen täysin digitaalinen komento-ohjausjärjestelmä. Siinä kiskoissa kulki peräkkäin tehojaksoja ja ohjausjaksoja. Ohjausjaksot olivat osoitteellisia paketteja, joissa oli veturin osoite ja nopeustieto ja tarkistussumma. Järjestelmässä oli käytetävissä 16 eri veturiosoitetta ja noin 80 vaihde- tai opastinosoitetta. Järjestelmään sai myös asetinlaitepaneelin, jonka teipattuun raidekaavioon saattoi asentaa vaihteiden tai opastimien kertaajia ja vaihteenkääntöpainikkeita. Kekusyksikön ja kahden vastaanottimen aloituspakettia myytiin noin 500 markan hintaan. Vastaanotimet olivat kooltaan erittäin pieniä,hybridipiirejä, joissa oli Texas Instrumentsin ns. maskiohjelmoitu prosessori (TMS1000) ja muutama oheiskomponentti. Vastaanottimien osoite koodattiin siltaamalla koodaustäpliä sähköä johtavalla hopeamaalilla. Järjestelmästä ei jostain syystä tullut myyntimenestystä. Ongelmia tuottivat vain 14 nopeusporrasta, keskitetty ohjaus (enintään neljä ajolaitetta toisissaan kiinni.) ja pieni teho (koko rataan saatiin vain 4 ampeerin virta). Hornby kehitti jossain vaiheessa kädessä pidettävän ajolaitteen, ja harrastajat purettuaan keskusyksikön kehittivät näppäimistön ja nopeussäätimen tilalle tietokoneliityntöjä, mutta laitteisto katosi markkinoilta 90-luvun alussa. Laitteita myytiin jonkin verran yhdysvaltoihin, jossa N-mittakaavan harrastajat asensivat Zero-1 vastaanottimia tyhjiin veturinkuoriin (dummy unit) ja ajoivat näitä parivedossa tavallisen veturin kanssa. Zero-1-vastaanottimien moottoreille antama jännite oli melko raakaa tavaraa. Lämpenemisongelman välttämiseksi tehoaste oli toteutettu britanniassa myydyissä versioissa triacilla ja amerikkalaisissa kahdella tyristorilla, mutta keskieuroopan pienoisrautatiekaluston paremmat moottorit (jopa itäsakasalaisen Pikon moottorit) eivät saaneet näitä puolijohdeventtiileitä sammumaan, ja siksi nopeudensäätö oli melko sattumanvaraista.
Märklin 80
Märklinin vaihtovirtaversion komento-ohjaus perustui valmiin kaupallisen kauko-ohjaussovelluksen käyttöön. Siinä käytettiin Motorolan kauko-ohjauspiiriperhettä, jonka lähetin kykenee lähettämään osoitteellisia komentoja, joita vastaanottimet koodauksesta riippuen tottelivat. Tiedonsiirto oli digitaalista, ja tarkoitettu välitettäväksi ultraäänellä tai infrapunateitse. Järjestelmän erikoisuus oln binaarisen (eli kasitilaisen) osoitteen sijaan kolmitlaisen osoitteen käyttö: osoite koostuu neljästä bitistä, jonka arvo voi olla nolla, ykkönen tai irti (ei mitään!). Vastaanottimessa osoite koodataan pienillä kytkimillä, ja kytkinten sattumanvarainen kääntely saattaa vaurioittaa vastaanotimen, mikäli saman bitin nolla- ja ykköskytkin käännetään yhtaikaa päälle! Märklin ohjasi lähetinpiiriä Philipsin tietokoneella niin että CMOS-analogiakytkimet suorittivat tietokoneen ohjeiden mukaan "kaukosäätimen napinpainalluksia", joista Motorolan lähetinpiiri loi paketteja ne lähetettiin vahvistimen (booster) välityksellä kiskoja pitkin vetureihin, joissa vastaanottimet sijaitsivat. Järjestelmä osaa myös ohjata vaihetita: vaihteidenkääntöpakettienpulssien taajuus poikkeaa vetureiden pakettien taajuudesta. Philipsin prosessori muuttaa Motorola-lähettimen oskilaattorin taajuutta lähettäessään vaihdekäskyjä. Keskusyksikkö, ja siihen liitettävät laajennukset (näppäimistöt jne.) keskustelivat keskenään Philipsin viihde-elektroniikan laitteiden ohjausta varten kehittämän I2L-väylän avulla Ruotsalaisen Allt om Hobby –lehden pienoisrautatie-elektroniikkatoimittaja Rutger Friberg oli kiinnostunut Märklinin järjestelmästä, ja kysyi Märkliniltä lisätietoja järjestelmästä. Märklin suhtautui penseästi, joten Rutger purki Märklinin laitteet, ja laati niiden rakenteesta ja toiminnasta "huolto-oppaan", joka julkaistiin ruotsinkielisenä kirjana "Digitaltåg". Rutger Friberg esitteli kirjassaan myös omatekoisen köyhän miehen keskusyksikön ja omatekoisen veturivastaanottimen rakennusohjeet. Tarinan mukaan kirjan julkistamisen jälkeen Märklinin kakkosmies oli lentänyt yksityiskoneellaan Ruotsiin Friberiä tapaamaan ja sopmaan yhteistyöstä. Märklinin Motorola-formaattiin perustuva järjestelmä osoittautui sellaiseksi myyntimensetykseksi (tällä hetkellä yli miljoona valmistettua dekooderia!), että siitä haluttiin kaksikiskoversio. Tässä yhteydessä (ellei jo Motorla-järjestelmän kehitystyön aikoihin) Märklin otti yhteyttä Bernd Lenziin, joka oli (edelleen vahvistamattoman tiedon mukaan) kehittänyt digitaalista komento-ohjausjärjestelmää hammaslääkärin tuolin ja laitteiden kauko-ohjaukseen ja kehitti ja valmisti Märklinille kaksikiskoversion. Kaksikiskojärjestelmä poikkeaa suuresti Motorola-formaatista. Sama Märklinin kaksikiskojärjestelmä otettiin myöhemmin myös Arnoldin N-mittkaavan junien komento-ohjausjärjestelmäksi (siksi Arnoldin keskusyksiköt ovat aivan Märklinin laitteiden näköisiä.
On tärkeää erottaa Märklinin 3-kiskoversio ja 2-kiskojärjestelmä toisistaan: 3-kiskojärjestelmä perustuu Motorola-formaattiin, eikä ole millään tavalla nykyisten kaksikisko komento-ohjausjärjestelmien kanssa yhteensopiva, mutta Märklin/Arnold kaksikiskoversio on rajoitetusti yhteensopiva NMRA-DCC:n kanssa! Motorola-formaatista on tullut uusi versio (Motorola-2-formaatti). En ole tutustunut siihen, mutta sen tärkein ero lienee laajentunut osoiteavaruus.
Fleischmann
Märklinin kolmikiskoversion vamistumisen aikaan Fleischmann kehitti oman komento-ohjausjärjestelmänsä FMZ:n (Fleischman MehrZug?). Jokipiin mukaan Fleischmann oli valjastanut joukon yliopistoprofessoreita järjestelmää kehittämään, ja he onnistuivatkin kehittämään järjestelmän, jossa vastaaottimilla varustettujen vetureiden lisäksi saattoi samalla radalla ajaa myös yhtä veturia ilman vastaaotinta. Fleischmannin järjestelmästä on tihkunut kovin vähän tietoja julkisuuteen, eikä sen hintatasostakaan voi sanoa juuri mitään, kun sitä myydään ainakin Suomessa vain tarjouspohjalta. Järjestelmässä on keskusyksikkö, johonka voidaan kytkeä joukko käsiajolaitteita. Veturivastaanottimet ovat ainakin osoittensa osalta ohjelmoitavissa. Järjestelmä on täysin yhden valmistajan järjestelmä eikä ole yhteensopiva muiden kanssa. Fleishmann on tuonut markkinoille myös (Uhlenbrochin valmistamia) NMRA-DCC-yhteensopivia vastaanottimia, jotka kykenevät FMZ tai NMRA-DCC-tilaan (tuotenumerot 6842 / 6843). Vuonna 2000 tulee markkinoille myös uusi Fleischmannin "dual-box", jossa on kaksi ajosäädintä, keskusyksikkö ja vahvistin, kaikki samassa paketissa. Laite muistuttaa kovasti Uhlenbrockin Intelliboxia, ja on ilmeisesti sen "pikkuveli". Dual-Boxin hienouksia ovat mm. mahdollisuus ajaa samanaikaisesti sekaisin Fleischmannin FMZ ja NMRA-DCC-vetureita samalla rataosalla, Digitraxin LocoNet-väylä lisäajolaitteiden kytkemiseksi ja Märklinin s88-feedback-väylä yksinkertaisten ilmaisinkytkentöjen ja kojetaulun kytkemiseksi. Erittäin mielenkiintoinen sekahedelmäsoppa!
Dynatrol ja CTC-16
Yhdysvalloissa on ollut markkinoilla joukko erilaisia komento-ohjausjärjestelmiä, osa analogisia ja osa puolittain tai täysin digitaalisia. Suosituimmat lienevät PSI:n Dynatrol, joka on analoginen ja perustuu PLL-tekniikalla viritettyihin vastaanottimiin ja ohjelmoitaviin oajolaitteisiin ja Model Raiulroader-lehdessä rakennussarja-artikkelina julkaistu puolittain digitaalinen CVP:n CTC-16. CTC-16:ssa vako-tasavirtaan on lisätty muutaman voltin jännitepiikkejä, joita lähetetään 16 piikin ryppäissä. Vastaanotin valitsee piikeistä omansa ja piikin leveyttä mittaamalla säätää junan kulkusuunnan ja nopeuden. (Tämä säätö tapahtui radio-ohjattavien servomoottoreiden ohjauksessa käytetyn piirin avulla. Pulssin leveys kuvasti servon haluttua asentoa, ja mikäli servo oli eri asennossa servon moottori käänsi servoa ja siihen kytkettyä säätövastusta haluttuun suuntaan kunnes säätövastuksesta saatiin se asento, jota pulssin leveys tarkoitti. Mitä etäämmällä ollaan tavoiteasennosta sitä lujempaa sevomoottori koitti kääntää säätövastusta. CTC-16:ssa säätövastus ei liikkunut keskiasennostaan minnekkään, joten servomootori pyöri sitä lujempaa, mitä etäämmäksi keskiasennosta servoa käskettiin kääntymään. Korvaamalla servon mekaniikka veturin moottorilla, saatiin veturin moottorin pyörimissuuntaa ja nopeutta säädettyä!) CTC-16 on siis aikajakoinen ja Dynatrol taajusjakoinen järjestelmä.
NMRA-DCC
Yhdysvalloissa oli muitakin komento-ohjausjärjestelmiä, mutta kaikki olivat jolain tapaa erilaisia, eikä niitä voinut mitenkään kytkeä toisinsa. Yhdysvaltojen pienoisrautatieliitto, NMRA ryhtyi tunnustelemaan mahdollisuutta sopia eri valmistajien kesken jokin yhteinen standardi, jotta vaihtokelpoisuus saataisiin jollain tapaa onnistumaan. Tätä standardia hiomaan perustettiin työryhmä (NMRA DCC Working Group), jonka jäseniksi kutsuttiin alan vaikutusvaltaisia ihmisiä (mm. ruotsalainen Rutger Friberg) ja valmistajia. Työryhmä oli erittäin kiinnostunut Märklinin Motorola-formaatista, mutta pian työryhmässä havaittiin, ettei sitä voinut juurikaan laajentaa. Katseet kääntyivät Lenzin suuntaan. Lenzin järjestelmä oli sellainen, että siihen voitiin lisätä toimintoja ja ominaisuuksia Lenz oli patentoinut kaksi ratkaisevaa toimintaa järjestelmästään (mahdollisuuden ajaa veturia ilman vastaanotinta ja mahdollisuuden ajaa veturivastaanottimella varustetulla veturilla tavanomaisessa järjestelmässä.) Lenz myönsi NMRA:lle oikeudet patenttiin Saksan ulkopuolella (siksi joissain yhdysvaltalaisten valmistajien euroopassa myydyissä versioissa ei ole ko. ominaisuuksia). NMRA jalosti Lenzin järjestelmää siten, että se saattoi laatia omat ohjeet ja jakaa niitä ilman patenttiriitoja.
NMRA laatii standardeja (Standard, S) ja suosituksia (Recommended Practice, RP). Mikäli valmistaja haluaa tehdä NMRA-DCC-yhteensopivan keskusyksikön tai vastaaottimen, tulee sen noudattaa NMRA:n DCC-standardeja ja mikäli ko. laitteessa on ominaisuuksia jotka on mainittu suosituksissa, tulee sen noudattaa ko. suositusta. Standardit (tai normit) säätelevät kiskoissa kulkevan tiedon rakenteen (komentopaketit) mutta ei laajennuksia. Kaikkien keskusyksiköiden on pakko pystyä tuottamaan perus-komento-paketteja ja kaikkien vastaanottimien on pakko pystyä tulkitsemaan näitä peruspaketteja. Peruspaketit pystyvät säätämään veturin nopeutta 14 nopeusportaalla. Veturiosoitteita on perusmallisssa käytössä 127.
Standardit määrittelevät kuinka keskusyksikön tulee tietoa lähettää (jännitteet ja pulssien pituudet, pakettien alku- ja loppumerkit, tarkistussummat jne…) ja kuinka vastaanottimien tulee sitä tulkita ja erityisesti: mitä tehdä, jos vastaaotin ei tajua saamaansa komentoa). Suositukset laajentavat pelkän 14 nopeusportaan ja suuntatiedon lähettämisen 28-portaiseksi tai 128-portaiseksi, lisätoimintojen käytön (valot yms). laajennettujen osoitteiden käytön (tuhansia osoitteita) ym. Suositukset sisältävät myös vastaaottimien kuvailu- tai konfiguraatiomuuttujat (Configuration variables, CV) ja niiden muuttamistilat (ohjelmointitila) ja vastaanottimien ominaisuuksien tallennustavan ja osoituksen (jopa yli tuhat erilaista mahdollista ominaisuutta, joita voidaan ohjemoimalla muuttaa, mm. vastaanottimen osoite, veturin liikkeellelähtönopeus, suurin nopeus, valojen ohjaus suunnan mukaan, nopeusportaiden lukumäärä jne).
Perusvastaanottimen tulee tunnistaa osoitteensa, ja toimia 14 nopeusportaan tilassa. Usein siinä on ajovalojen ohjaamista varten kaksi ohjelmoitavaa ulostuloa, ja ne saadaan suunnasta riippuviksi ja ajon aikana päälle tai pois. Suosituksissa on määritelty, mitkä konfigurointimuuttujat sisältävät mitäkin tietoa (numero 1 on veturin osoite, 2 on alkunopeus, 3 maksiminopeus jne). Vastaanotin voi olla sellainen, ettei siinä ole mahdollisuuksia muuttaa sen ominaisuuksia, mutta mikäli vastaanottimessa on konfiguraatiomuuttujia, on niiden oltava suositusten mukaissa muuttujissa (jos vastaanottimen osoite on vaihdettavissa, sen on oltava muuttujassa yksi, ja jos alkunopeus on aseteltavissa, on se oltava muuttujassa 2 jne…).
On tärkeää ennen vastaanottimen ostamista tarkistaa, mitä ominaisuuksia vastaanottimessa on ja mitkä niistä on ohjelmallisesti muutettavissa. Yleisesti näitä tietoja muutetaan vain ns. ohjelmointiraideosalla, joka on eristetty muusta radasta. Tämä siksi, että ohjelmointitilaan pakottava käsky on osoitteeton (broadcast command) ja sen saadessaan on vastaanottimen mentävä ohjelmointitilaan. Siksi on pidettävä huoli, että käsky menee vain yhdelle veturille, muuten ohjelmointitilassa tehdyt muuttujien asettelut vaikuttavat kaikkiin radalla olleisiin vastaanottimiin (esimerkiksi vastaanottimen osoitteen muutos muuttaisi kaikkien radalla olevien vetureiden osoitteen samaksi!).
Suosituksiin on tullut myöhemmin laajennus, jonka avulla vastaanottimen ohjelmointi voi tapahtua myös osoitteelisesti, jolloin aina ei tarvita erillistä ohjelmointiraideosaa. Vastaanotin ei pysty helposti lähettämään tietoa keskusyksikölle päin. Tämä on puute, ja ongelman ratkaisua etsitään. Jotkut kaupalliset valmistajat ovat kehittäneet omia ratkaisujaan (Zimo, Lenz, Digitrax), mutta standardia ei ole olemassa. Ohjelmointitilassa vastaanottimet voivat lähettää nykyisten suositusten mukaisesti signaalin keskusyksikölle käyttämällä hetkellisesti veturin moottoria. Tätä voidaan käyttää hyväksi kyseltäessä vastaanottimelta sen konfiguraatiomuuttujien arvoja: vastaanotin vastaa myöntävästi käyttämällä moottoria, ja moottorin käyttäminen luo virtapiikin, jonka keskusyksikkö havaitsee. (Acknowledgement, Ack).
Mitä tällä hetkellä kovasti kaivataan, on mahdollisuus saada tieto tietyn veturin sijainnista rataverkolla. Digitrax on kehittänyt tällaisen menetelmän, jota se kutsuu termillä transponding. Näin esimerkiksi tietokoneen näytöllä näkyvään ratakaavioon saadaan raiteenvarausilmaisimen kautta jopa tunnistettua, mikä veturi ko. raiteella on.
TMW-DCC
Keskusyksikkö on yleensä kallein osa kaupallista järjestelmää. Keskusyksikkö voidaan korvata vanhalla PC:llä (8066 riittää). Lisäksi tarvitaan peliohjainkortti, rinnakkaisväyläliitäntä (LPT, Centronics) ja noin kolmen sadan markan edestä elektroniikkaa. TMW-DCC (Tillorpin mekaanisen konepajan DCC) on julkaistu Internetissä, ja sieltä löytyvät kaikki kytkentäkaaviot, ja tietokoneen ohjelma sekä prosessorikortilla olevan PIC-prosessorin mikrokoodi, jonka lataamiseen PIC-prosessorin sisään tarvitaan omatekoinen ohjelmointilaite. Järjestelmän kehittäjä, Lars Lundgren on Skövden pienoisrautatiekerhon kantavia voimia, ja erittäin avulias laitteiston vikoja metsästäessäni.
Ajolaitteet ovat vain säätövastuksia ja painonappeja, jotka on kytketty PC:n peliohjainporttiin (yhdessä peliohjaimessa – eli joystickissä – on kaksi säädintä (X- ja Y-suunta) ja kaksi tulitusnäppäintä, josta saadaan kaksi ajosäädintä ja suuntakytkintä. Peliohjainportiin saadaan kaksi peliohjainta, eli neljä ajolaitetta! Normaalisti PC:hen ei saa kuin yhden peliohjainkortin (kaksi peliohjainta=4 ajolaitetta), mutta muutamalla veitsen viillolla ja hyppylangalla peliohjainkortin osoitteen voi vaihtaa ja näin toinen kortti menee eri osoitteeseen: saadaan yhteensä kahdeksan ajosäädintä! Tietokoneen näppäimistöä voi käyttää yhdeksäntenä ohjaimena ja sarjaliikenneporttiin voi rakentaa vielä infrapunalukulaitten, jolloin tavallisesta TV:n kaukosäätimestä saa kymmenennen ajolaitteen. TV:n kaukosäätimellä (ja näppäimistöllä) voi myös ohjata kiinteitä dekoodereita (vaihteita jne.).
Keskusyksikkö, eli vanha PC lukee peliohjainkortteja ja näppäimistöä ja tuottaa komento-ohjauskomentoja rinnakkaismuodossa kirjoitinporttiin. Näytöllä näkyy kunkin kytketyn ajolaitteen suunta- ja nopeustieto sekä ajolaitteeseen kytkettyjen vastaanottimien numerot. Järjestelmällä voidaan myös tuottaa funktio-toimintoja jolloin lisälaitelähdöin varustettujen vastaanottimien ominaisuuksia F1—F4 ja ajovaloja (FL) voidaan ohjata ajosäätimillä tai näppäimistöllä. Oheisfunktioiden tila näkyy myös jatkuvasti näytöllä!
Peliohjainkortin (-korttien) , ajosäätimien ja (internetistä ilmaiseksi imuroitavan) ohjelman lisäksi tarvitaan muutamia pieniä, elektronisia piirikortteja, jotka muodostavat sarja-rinnakaismuunnoksen, vahvistimen, teholähteen, ohjelmointiraideosan kuittausilmaisimen ja ajovirran kytkentää ohjaavan relekortin:
Prosessorikortti TMW-01 sisältää veturivastaanottimista tutun PIC 16C84-prosessorin (noin 30 markkaa) ja muutaman peruskomponentin. Prosessorikortti kytketään tietokoneen rinnakkaisporttiin, ja kortti hoitaa pakettien rakentamisen ja ajastamisen.
Teholähde TMW-02 sisältää tasasuuntaajan, suodatuskondensaattorit ja kolme jänniteregulaattoripiiriä, Se tekee esimerkiksi ajomuuntajan lisälaitelähdön vaihtovirrasta seuraavat jännitteet: +12V, +5V ja –12V. Tämä riittää ruokkimaan yhtä midiboosteria. Jänniteregulaattorit (kolmijalkaisia piirejä) vaativat ehdottomasti jäähdytyslevyn!
Midibooster TMW-05 riittää pienen radan vahvistimeksi. Se pystyy syöttämään noin 1,5 ampeerin virran kiskoihin. Tapiolan rataa ajettiin vuonna1999 kahdessa yleisöesityksessäkin vain yhdellä midivahvistimella! Vahvistimessa on operaatiovahvistin ja kaksi tehotransistoria ohjaustransistoreineen ja muutama oheiskomponentti. Ylivirtasuojana ja oikosulkuilmaisimena käytettiin auton jarruvalopolttimoa (21W). Valo palaa kirkkaasti oikosulkutilanteessa.
Näillä komella kortilla pääsee jo alkuun. Tapiolassa ensimmäiset kokeilut tehtiin tällä kokoonpanolla. Veturivastaanottimia voi ohjelmoida ja radalla ajaa paria, kolmea eurooppalaista (so. vähävirtaista) veturia samanaikaisesti.
Relekortti TMW-0X kytetään boosterin ja radan väliin. Prosessorikortti ohjaa relekortin kahta relettä niin, että ajovirta katkeaa varsinaisesta radasta ohjelmointitilaan mentäessä, ja ohjelmointiraideosalle kytketään ajovirta etuvastuksen kautta. Kun ohjelmointitilasta poistutaan kytkeytyy myös ohjelmointiraideosalle ajovirta, joten ohjelmointiraideosa voi sijaita vaikka veturitallialueella, ja toimii tavanomaisena raideosuutena ohjelmointitilan ulkopuolella. Hätäjarru pysäyttää kaikki aktiiviset veturit, ja sen lisäksi pimentää radan relekortin avulla.
Kuittausilmaisin TMW-03 kytketään ohjelmointiraideosan ja relekortin väliin. Kun vastaanottimelta kysytään sen konfigurointimuuttujien arvoja, kuittaa vastaanotin oikean arvon kohdalla käyttämällä lyhytaikaisesti veturin moottoria. Kuittausilmaisin tunnistaa tästä syntyvän virtapiikin, ja välittää tiedon prosessorikortin kautta tietokoneelle.
Tapiolassa on tällä hetkellä (maalis-huhtikuun vaihde 2000) tämä kokoonpano käytössä. Vuoden 2000 Model-Expoon pyritään saamaan toinen booster, ja rata osittamaan, jolloin virta riittää useammankin junan yhtaikaiseen liikkumiseen. Booserimme sisältää teholähdekortin TMW-02 ja midiboosterin TMW-05. Laitekotelossa on varaus mahdollisen vara-prosessorikortin ymppäämiseen lisäboosterin yhteyteen, jolloin varsinaisen elektroniikkamme vikaantuessa voidan rataa hätätilassa ajaa boosterimme avulla.
Olemme kytkeneet peliohjainliittimet ja boosterin tarvitsemat johdot yhteen, ja 25-napaisen tietokonekaapelin avulla voidaan ajolaitteiden kytkentäpaneelit ja radan boosterit ketjuttaa kaikki yhteen.
Kerhorataan emme juuri ole tehneet muutoksia DCC-käyttöön siirryttäessä: radan alle on asennettu moninapaisia liittimiä, joidenka napoihin on tuotu johtimet jokaiselta eristetyltä raideosalta. Boosteri kytketään näihin liittimiin pistokkeella jossa em. Johtimet kytekytyvät yhteen, jolloin koko rata on jatkuvasti virrallinen vaihteiden asennoista riippumatta (Tapiolassa on vaihteiden ohjaama virransyöttö).
Probstin dekooderi
Puolet kaupallisten vast.ottimien hinnasta, ei enää taloudellisesti järkevä. Perustuu PIC-16F84-prosessoriin. Alkuperäinen dekooderi/vast.otin ei toimi luotettavasti käytännön ympäristössä – ongelmana on PIC 16F84 -prosessorin brown-out-toiminnan heikkous. Lue toisaalta lisää aiheesta.
NMRA:n DCC-Standardit
Peruspaketin rakenne (NMRA:n standardi 9.2)
Peruspaketti koostuu siis esipuheesta, osoitetavusta ja ohjetavusta sekä tarkistussummatavusta. Paketin tavujen tieto on binaarista, ja kiskoihin lähetetään tavun paketit aina eritenmerkitsevä bitti edellä. Eniten binaarilukua muuttava bitti, eli luvun vasemmanpuoleisin numero muuttaa tavun esittämää lukua eniten. Puhutaan siis enitenmerkitsevästä bitistä (Most signifcant bit, MSB) ja vastaavasti vähitenmerkitsevästä bitistä (least significant bit, LSB). Bitit numeroidaan vähitenmerkitsevästä enitenmerkitsevään, ja yleensä niin, että vähitenmerkitsevä on bitti 0, ja enitenmerkitsevä (kahdeksas) bitti on bitti numero seitsemän. Tämä on toisaalta sekavaa, mutta noudattaa yleensä digitaalitekniikassa noudatettua käytäntöä.
HUOM: NMRA:n standardien esitystavasta poiketen olen tavun rakennetta esittävissä riveissä sijoittanut tavuviivan bitin kolme ja neljä väliin, jotta tavun bittien sijainti olisi helpompi hahmottaa: On helpompaa hahmottaa, onko tavun "00010000" bitti numero 4 ykkönen, jos tavu esitetään muodossa "0001-0000"
111111111
| 0 | 0AAA-AAAA | 0 | 01DU-SSSS | 0 | EEEE-EEEE | 1| 1111…
Osoitetavu (Address data byte): 0AAA-AAAA
Osoitetavussa on kahdeksan bittiä. Enitenmerkitsevän bitin (bitti 7) tulee peruspaketissa olla aina nolla, joten varsinaiselle osoitteelle jää seitsemän bittiä (bitit 0—6), joilla voidaan esittää osoitteet nollasta 127:een (A = Address bit, osoitebitti). Osoite nolla on varattu ilman dekooderia olevan veturin osoitteeksi, joten käytännössä perusosoitteita on käytettävissä 127
Ohjetavu (Instruction data byte): 01DU-SSSS
Ohjetavusta kaksi enitenmerkitsevää bittiä ovat aina "01" (bitti 7 = 0; bitti 6 =1). Bitti numero viisi on suuntabitti (D = Direction bit, suuntabitti) . Bitin arvo 1 tarkoittaa suuntaa "eteenpäin", ja suunta 0 "taaksepäin". Bitti neljä on tällä hetkellä peruspaketissa määräämätön (U=Undefined, määrittämätön), se voi olla nolla tai ykkönen. Bitit 0—4 määräävät nopeuden 14 nopeusportaalla (S = Speed bit, nopeusbitti):
|
Bitit |
N |
Toiminta |
|
01DU-0000 |
0 |
Seis |
|
01DU-0001 |
1 |
Hätä-seis |
|
01DU-0010 |
2 |
Nopeusporras 1 |
|
01DU-0011 |
3 |
Nopeusporras 2 |
|
01DU-0100 |
4 |
Nopeusporras 3 |
|
… |
… |
… |
|
01DU-1101 |
14 |
Nopeusporras 12 |
|
01DU-1110 |
15 |
Nopeusporras 13 |
|
01DU-1111 |
16 |
Nopeusporras 14 |
Hätä-seis käskyllä on veturin pysähdyttävä mahdollisimman nopeasti. Jos dekooderiin on ohjelmoitu keinomassa-,viive- eli vauhtipyörätoiminto (momentum/inertia/flywheel) on veturin siitä huolimatta pysähdyttävä mahdollisimman nopeasti.
Tarkistussummatavu (Error detection data byte): EEEE-EEEE
Tarkistussummatavu lasketaan osoitetavun ja ohjetavun vastaavien bittien XOR’ina: mikäli kummankin tavun ko. bitti on sama (kumpikin nolla tai kumpikin ykkönen) on tarkistussummatavussa tällä kohtaa nolla, jos osoitetavun ja tietotavun vastaavat bitit ovat erilaiset, on tarkisussummassa tällä kohtaa ykkönen.(E=Error detection, [virheen]tarkistus).
Ylläolevassa kuvassa näkyvä paketti ohjaa veturia numero 55 kulkemaan eteenpäin nopeusportaalla 6.
Paketin sisältö on voidaan siis esittää muodossa:
111111111
| 0 | 0AAA-AAAA | 0 | 01DU-SSSS | 0 | EEEE-EEEE | 1 |Standardin seuraavassa versiossa nopeusportaita on peruspaketissa 28, ja ohjetavun bitti 4 (jolla ei ollut väliä) tulee nopeustiedon uudeksi vähitenmerkitseväksi bitiksi. Tämä vastaa nykyisin suosituksissa ollutta tapaa rakentaa 28 nopeusportaan nopeustieto.
Tämä ohjetavun bitti numero neljä voi myös ohjata 14 nopeusportaan tilassa veturin ajovaloja. Jos dekoodri on asetettu ohjelmoimalla 14 nopeusportaan tilaan, ja dekooderia ohjataan ikään kuin se olisi 28 nopeusportaan tilassa, syttyvät ja sammuvat valot joka toisella nopeusportaalla!
Vastaanottimien nollaustavu kaikille vastaanottimille
111111111
| 0 | 0000-0000 | 0 | 0000-0000 | 0 | 0000-0000 | 1 |Paketti, jonka osoite on nolla ja ohjaustavu on nolla. Vastaanottimen tulee pysäyttää veturi välittömästi.
Vastaanottimien tyhjä tavu kaikille vastaanottimille
111111111
| 0 | 1111-1111 | 0 | 0000-0000 | 0 | 1111-1111 | 1 |Paketti, jonka osoite on 255 (1111-1111), ja ohjaustavu on nolla on tyhjä paketti, ja kaikkien vastaanottimien tulee tukita se paketiksi, joka on osoitettu jollekin toiselle vastaanottimelle.
Pakettien lähetystiheys
Paketteja lähetetään jatkuvasti, koska on mahdollista että vastaanotin on hylännyt kiskojen ja pyörien välisestä huonosta kontaktista johtuen jonkin sille tarkoitetusta paketista. Vstaanottimen tulee pystyä tulkitsemaan sille osoitettuja paketteja vähintään 5 millisekunnin välein. Paketteja tulee toimittaa vähintään 30 millisekunnin välein.
Tarkoittaako tämä, että vastaanottimelle numero 3 tulee toimittaa paketti, jonka osoite on "3" vähintään 30 millisekunnin välein, vai sitä, että kunhan joku paketti tulee vähintään 30 ms välein, ja muulloin riittää kun tulee ykkösiä (pitkää esipuhetta!)???
NMRA:n Suositukset (mm. Konfigurointimuuttujien arvot ja eri ohjelmointitavat) lisätään tähän!
Mitä pitää ottaa huomioon
Yhteensopivuus,
Märklin Motorola vastaan Fleischmann FMZ vastaan Trix Selectrix vastaan NMRA-DCC. NMRA-DCC:n yhteydessä ohjausväylä ratkaiseva!
Kustannukset,
Kallis keskusyksikkö, vastaanottimet, mutta halvempi kaapelointi. Vaihtoehtoiset ratkaisut
Suuret virrat,
Oikosulku raiteilta suistuttaessa, radan osittaminen pienempivirtaisiksi osiksi
Vaihteiden sopivuus,
Vaihteen kääntyminen ei saa aiheuttaa hetkellistä oikosulkua, vaihteen aukiajo (ajo myötävaisteeseen kun vaihde käännetty väärin) saattaa aiheuttaa oikosulun.